Ключевые слова: динамически настраиваемый гироскоп, время готовности, приводной двигатель, угловая скорость, моделирование, корректирующее устройство.
магистрант, кафедра «Авиационные приборы и устройства», Арзамасский политехнический институт (филиал) Нижегородского государственного технического университета им. Р. Е. Алексеева, г. Арзамас
nikita_dyorin@mail.ru
Юрманов Сергей Юрьевич
ведущий инженер-электроник, АО «Арзамасский приборостроительный завод им. П. И. Пландина», г. Арзамас
Гуськов Андрей Александрович
кандидат технических наук, доцент, кафедра «Авиационные приборы и устройства», Арзамасский политехнический институт (филиал) Нижегородского государственного технического университета им. Р. Е. Алексеева, г. Арзамас
guskov@apingtu.edu.ru


Объектом исследования в работе является динамически настраиваемый гироскоп (ДНГ) – устройство, измеряющее угловую скорость поворота корпуса летательного аппарата относительно невращающейся инерциальной системы координат. В процессе разработки прецизионных измерительных и управляющих устройств точность всего устройства по большей части определяется точностью первичного преобразователя, то есть датчиком [1].
Актуальность работы подтверждается тем, что динамически настраиваемые гироскопы имеют меньшую стоимость и массогабаритные характеристики по сравнению с гироскопами поплавкового типа. Область применения ДНГ обширная: они могут выступать в роли чувствительного элемента в гиростабилизированных платформах, в бесплатформенных неподвижных системах, блоках, в системах курсовертикалей и гироинклинометров бортовой аппаратуры [2].
Целью работы является повышение точностных характеристик ДНГ за счет обеспечения стабильности работы двигателя в широком диапазоне измеряемых угловых скоростей, что особо важно для динамической настройки ДНГ. Обеспечение стабильности работы двигателя достигается введением в контур управления корректирующего устройства (КУ). При этом основными исходными требованиями к работе двигателя ДНГ являются:
а) нестабильность угловой скорости вращения ротора привода – не более ± 0,02 % от номинального значения;
б) время готовности двигателя к работе – не более 0,8 сек;
в) устойчивость в работе при кратковременном воздействии углового ускорения до 3500 °/с2.
Чтобы реализовать поставленную задачу был выбран приводный двигатель (ПД), который способен обеспечить высокую стабильность частоты вращения ротора. Двигатель с такой конструкцией близок к конструкции двигателя переменного тока, в которой обмотки якоря являются частью статора, а ротор состоит из постоянных магнитов. Двигатель оснащен датчиками Холла – датчиками, которые фиксируют наличие магнитного поля и измеряют его напряженность.
Для оценки эффективности работы такого двигателя был выбран метод расчёта звеньев коррекции передаточной функции при помощи системы автоматизированного проектирования Mathcad.
Для определения параметров магнитной системы двигателя, необходимых для расчета контура управления, была разработана модель для конечно-элементной магнитной системы (рис. 1). В результате моделирования было выявлено, что магнитная индукция на внешней поверхности ротора ПД составляет менее 20 мТл. Максимальная концентрация магнитного поля в магнитопроводе ниже величины насыщения материала ротора ПД.
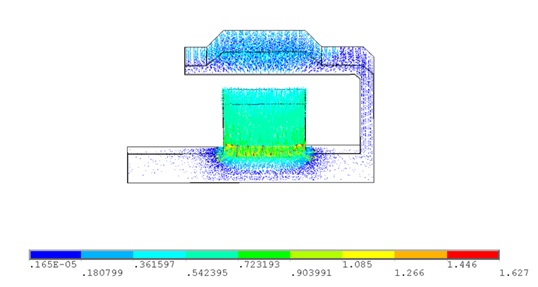
Рис. 1. Схема распределения магнитных потоков в роторе ПД
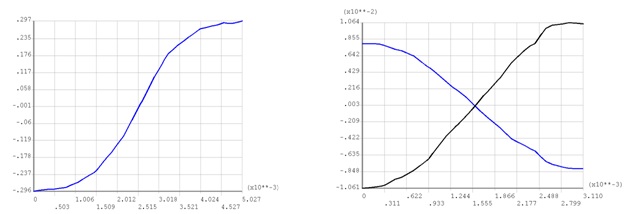
Величина горизонтальной составляющей магнитной индукции в рабочем зазоре составляет 0,29 Тл (рис. 2-а), вертикальной составляющей – не более 0,45 мТл. Это позволяет говорить о малой величине боковых потоков магнитного поля электромагнитной системы ПД, что, в свою очередь, создает минимальные воздействия на подшипниковые опоры ПД при взаимодействии с обмотками статора во время работы двигателя. Величина боковых магнитных потоков достаточна для переключения режимов работы датчиков Холла на датчике положения (рис. 2-б), что позволяет реализовать схему управления напряжением питания с блока разгона приводного двигателя.
|
а) |
б) |
Рис. 2. Графики магнитного поля ротора ПД:
а) график индукции в рабочем зазоре ротора ПД
б) график индукции в плоскости датчика Холла
Для определения параметров катушек статора был выбран провод с диаметром сечения 0,112 мм. В результате расчетов установлено, что статор с таким проводом будет иметь наиболее высокий коэффициент полезного действия, поскольку он имеет наименьшую характеристику нагрева. При повышенной температуре + 75 °С перегрев статора составляет 41,5 °С, что суммарно не превышает предельно допустимую работу изоляции провода.
Структурная схема привода с обратной связью показана на рис. 3.

Рис.3. Структурная схема привода с корректирующим устройством и обратной связью:
WКУ — передаточная функция корректирующего устройства;
WЭл-Мех — передаточная функция электромеханических узлов;
WМех — передаточная функция механических узлов.
При воздействии внешнего ускорения структурная схема преобразуется к виду (рис. 4).

Рис. 4. Структурная схема привода с корректирующим устройством и обратной связью при отработке воздействия внешнего углового ускорения по оси вращения
При наименьшей частоте вращения привода будут наиболее жесткие требования к стабильности частоты вращения в абсолютном значении.
Для оценки стабильности частоты вращения на основе структурной схемы (рис. 4) и рассчитанных параметров двигателя разработана математическая модель. Чтобы получить значение передаточной функции корректирующего устройства Wку(S), нужно получить коэффициенты отработки замкнутого контура. Для этого разложим в ряд Фурье воздействие углового ускорения.
Зависимость углового ускорения от времени раскладывается в следующий ряд:
![]() , (1)
, (1)
где ![]() =
=  ,
,
![]() =
= ,
,
![]() =
= .
.
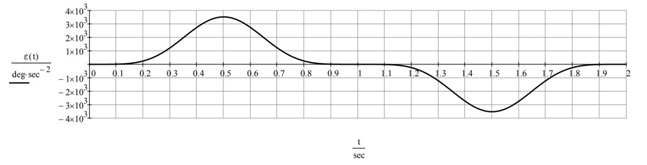
Рис. 5. Зависимость воздействующего углового ускорения от времени
Значения коэффициентов ряда Фурье были получены путем преобразования в математической модели.
Передаточная функция отработки воздействия углового ускорения на ось вращения ротора привода замкнутым контуром обратной связи равна:
 . (2)
. (2)
При этом корректирующее устройство работы двигателя должно обладать астатизмом первого порядка. В этом случае передаточная функция корректирующего устройства будет иметь следующий вид:
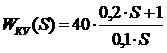 . (3)
. (3)
На рис. 6 показано, как при внешнем воздействии частота вращения ПД зависит от времени. Изменение скорости вращения привода не превышает ±0,02 % от номинального значения.
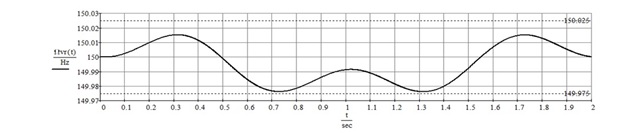
Рис. 6. Реакция замкнутого контура на внешнее воздействие
На рис. 7 показана стабилизация частоты вращения опытного образца двигателя для разных значений номинальной частоты вращения привода. Стабилизация по частоте вращения привода, а также время замыкания обратной связи приведены в таблице 1.
Таблица 1
Значения времени замыкания обратной связи при различных частотах вращения
|
Номинальная частота вращения привода, Гц |
Время замыкания обратной связи, мсек |
|
160 |
210 |
|
330 |
380 |
|
400 |
395 |
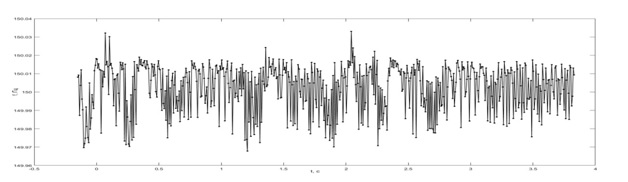
Рис.7. График частоты вращения от времени при частоте вращения 150 Гц, после стабилизации
Таким образом, время замыкания обратной связи при максимальной частоте вращения привода составило 395 мс, что соответствует времени готовности не более 0,8 с. Изменение скорости вращения привода не превышает ± 0,02 % от номинала, что удовлетворяет условию поставленной задачи. Опираясь на вышеизложенное, можно сделать вывод, что приводный двигатель, работающий в широком диапазоне измеряемых угловых скоростей стабилен, а ДНГ с таким двигателем будет обладать высокими точностными характеристиками.
Список использованных источников
- Брозгуль Л. И., Смирнов Е. Л. Вибрационные гироскопы. М. : Машиностроение, 1970. 407 с.
- Власов Ю. Б., Филонов О. М. Роторные вибрационные гироскопы в системах навигации. Л. : Судостроение, 1980. 256 с.
Derin Nikita
master student, Department Aeronautical devices and units, Arzamas Polytechnic Institute (branch), R. E. Alekseev Nizhny Novgorod state technical University, Arzamas
Yurmanov Sergey
leading Electronic Engineer, P. I. Plandin Arzamas Instrument-Making Plant, Arzamas
Guskov Andrey
PhD in Technical Sciences, Associate Professor, Department Aeronautical devices and units, Arzamas Polytechnic Institute (branch), R. E. Alekseev Nizhny Novgorod state technical University, Arzamas
THE OPERATION MODELING OF A DYNAMICALLY ADJUSTABLE GYROSCOPE DRIVE ENGINE
Abstract: The aim of the work is to improve the accuracy characteristics of a dynamically tuned gyroscope by ensuring the stability of the drive engine in a wide range of measured angular velocities. Ensuring the engine stability is achieved by introducing a correcting device into the control loop. The paper presents the results of calculations and selection of the drive engine parameters, as well as the results of the engine operation modeling.
Keywords: dynamically tuned gyroscope, readiness time, drive engine, angular velocity, simulation, correcting device.
© АНО СНОЛД «Партнёр», 2022
© Дерин Н.И., 2022
© Юрманов С.Ю., 2022
© Гуськов А.А., 2022