кандидат технических наук, доцент, заведующий кафедрой мобильных энергетических средств и сельскохозяйственных машин имени профессора А.И. Лещанкина, ФГБОУ ВО «Национальный исследовательский Мордовский государственный университет имени Н.П. Огарёва», г. Саранск
Гусев Александр Юрьевич
аспирант, кафедра мобильных энергетических средств и сельскохозяйственных машин имени профессора А.И. Лещанкина, ФГБОУ ВО «Национальный исследовательский Мордовский государственный университет имени Н.П. Огарёва», г. Саранск


![]()
Воздействие фрезерными активными рабочими органами (АРО) на почву и корни растений носит ударный характер, при котором из-за инерции обрабатываемого материала на них возникает резкая концентрация напряжений. Картина обрабатываемой массы почвы меняется существенным образом по сравнению с тем, что происходит медленном приложении на нее внешней нагрузки. Ножи АРО способны измельчить твердые глыбы, находящиеся на поверхности и, не забиваясь, обрабатывать сильнозадернелые торфяники и минеральные почвы.
Варьирование значений окружной и поступательной скоростей, а также числа и формы АРО позволяет изменять в широких пределах размеры отделяемых стружек почвы, а также степень их измельчения и дальность отбрасывания. Поэтому при правильном выборе параметров АРО может быть получена степень деформации почвы, соответствующая агрономическому заданию. Конструкция АРО представляет собой рабочие органы (ножи), жестко присоединенные к валам (роторам), принудительно вращаемого двигателем через редуктор (рисунок 1) [1]. Ось вращения роторов расположена параллельно поверхности поля и перпендикулярно направлению движения почвообрабатывающей фрезы.

Рис. 1. Кинематическая схема самоходной почвообрабатывающей фрезы с комбинированным вращением АРО
Ножи представляют собой острые Г-образные пластины. Максимальная глубина обработки, разрабатываемой АРО за один проход должна составлять 20 см. Расчет проводим для максимальной глубины обработки h = 20 см (0,2 м). Начинаем с выбора диаметра барабанов. Конструктивно принимаем, что ось АРО и цепной редуктор заглублены на некоторую глубину и совершают работу в заглубленном состоянии.
При ориентировочном расчете принимаем:
r = 0,77h = 0,77·0,2 = 0,155 м. (1)
Принимаем r = 0,16 м.
Тогда диаметр фрезбарабанов будет равен:
D = 2r = 2·0,16 = 0,32 м. (2)
Определим кинематический параметр λ.
Для этого предварительно определим допустимую высоту гребней на дне борозды:
hгр ≤ 0,2h = 0,2·0,2 = 0,04 м. (3)
Далее воспользуемся результатами экспериментальных исследований. Согласно рисунку 175 [2] при условии, что количество ножей, вращающихся на одной плоскости – z = 4, и при hгр/r = 0,04/0,16 = 0,25 получим:
– для АРО имеющих вращение «сверху–вниз» (индекс – 1): λ = 4,5;
– для АРО имеющих вращение «снизу–верх» (индекс – 2): λ = 3.
Величина подачи на нож при обработке почвы определяет размеры клиньев после прохода ФМК.
Для определения подачи воспользуемся формулой:
После подстановки значений в (2.4) получим:

Далее определим окружную скорость на АРО vоi (м/с) по формуле:
vоi = vп λi, (5)
где vп – поступательная скорость мотокультиватора, м/с;
с учетом работы на первой передаче – vп = 0,63 м/с.
После подстановки значений в (5) получим:
vо1 = 0,63·4,5 = 2,8 м/с;
vо2 = 0,63·3 = 1,9 м/с.
Определим частоты вращения приводных валов АРО nфi (мин–1) по формуле:
Важным моментом проектирования АРО является выбор значений переднего и заднего углов резания лезвия ножа. Из опытов по резанию почвы клином и динамометрирования известно, что минимальный расход энергии на отделение стружки бывает при угле резания β = 20…25о. Величина заднего угла резания должна быть равна 10о, а угол заострения, обеспечивающий прочность лезвия, должен быть i ≥ 10о. Величина углов резания β и ε лезвия ножа в процессе отрезания стружки непрерывно изменяется, что обусловлено траекторией движения лезвия, представлена на рисунке 2.
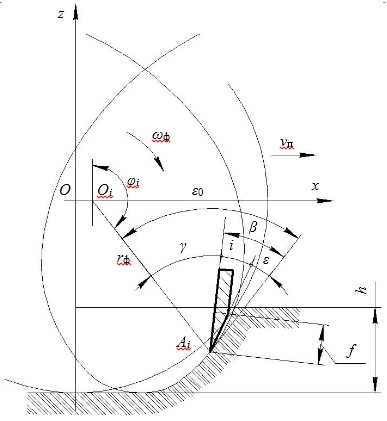
Рис. 2. Схема траектории движения ножа
Из рисунка 2 следует, что:
β = i + ε, (10)
где β и ε – передние и задние углы резания лезвия ножа, оборудуемые передней и задней гранями лезвия с касательными к окружности радиуса;
i – угол заострения лезвия.
Кроме того,
βо = ρо – ∆ ε, (11)
ε = ε о – ∆ ε, (12)
где ∆ ε – угол, образуемый касательными к окружности и трохоиде.
Установление связи углов ρо и ε о с углами ρ и ε необходимо для проверки правильности изготовления ножей.
Для приближенного расчета величины угла ∆ ε могут быть использованы графики.
Для разрабатываемой фрезы, у которой h = 0,2 м; D = 0,32 м; λ = 6; i = 10o; ε = 10о.
В рассматриваемом случае: h / r = 0,2 / 0,16 = 1,25,
чему соответствует α = 15о.
По найденному значению Δε = 10о и ранее принятым значением углов i и ε, согласно зависимостей (9), (7) и (8), получим:
εо = 10 + 10 = 20о;
β = 10 + 10 = 20о;
βо = 20 + 10 = 30о.
Наибольшее значение истинного резания, соответствующее углу α = 90° и Δε = 0 по формуле (10) βmax = βо.
Угол скоса ножа (по А. Д. Далину – угол в плане) должен быть равен 50–60о, а радиус скругления угла, образуемого стойкой и крылом ножа, rкр ≥ 30 мм, так как уменьшение вызывает заметное увеличение приводного момента.
Очертание стойки Г-образного ножа должно обеспечивать постепенное внедрение в почву сначала лезвия стойки, затем лезвия крыла, т. к. при этом происходит плавное нарастание величины крутящего момента, который бывает меньше, чем при внедрении ножа.
Угол Ψ, образуемый лезвием стойки с радиусом, А. Д. Далин рекомендует брать в 30о. Заточка стойки Г-образного ножа должна производиться с внутренней, а крыла – с наружной стороны крыла. Для обеспечения самозатачиваемости лезвия крыла твердый слой необходимо наносить на наружную сторону лезвия.
Для полного подрезания сорняков суммарная ширина захвата левого и правого ножей, установленных на соседних дисках, должна превышать на 15–20 мм расстояние между дисками t (м):
t = 2 b – l , (13)
где: b – ширина захвата одного ножа, b = 0,06 м;
l – перекрытие ножей, м;
принимаем l = 0,02 м;
t = 2 ∙ 0,06 – 0,02 = 0,1 м.
Радиус трохоиды Ri (м) определяем по формуле:
![]()
После подстановки значений в (2.5) получим:

Основные параметры, рассчитанные выше, сводим в таблицу 1.
Таблица 1.
Основные параметры ротационной фрезы
| Направление вращения | h, м | S, м | r, м | λ | R, м | ∆εо | εо | nф,xxxx
мин –1 |
vо,g м/с |
vп, м/с |
| «Сверху- вниз» | 0,20 | 0,11 | 0,16 | 4,5 | 0,038 | 10,3 | 10,0 | 167,2 | 2,8 | 0,63 |
| «Снизу-вверх» | 0,16 | 3,0 | 0,052 | 113,5 | 1,9 |
Таким образом, проведенные расчеты позволяют обосновать основные параметры и режимы работы отдельных роторов с активных рабочих органов самоходной почвообрабатывающей фрезы с их комбинированным вращением, а также основные параметры функционирования в целом почвообрабатывающей машины, а именно ее скорости движения.
Список использованных источников
- Обоснование кинематической схемы почвообрабатывающей фрезы с комбинированным вращением активных рабочих органов / А. Ю. Гусев, В. Ф. Купряшкин, С. Н. Звонов, С. С. Лоскутов // E-SCIO. 2019. № 12. С. 1–10. URL: https://e-scio.ru/?p=9169 (дата обращения: )
- Синеоков Г. Н., Панов И. М. Теория и расчет почвообрабатывающих машин. М. : Машиностроение, 1977. 328 с.
Kupryashkin Vladimir
PhD in technical Sciences, associate Professor, head of the Professor A. I. Leshchankin Department mobile power tools and agricultural machines, N. P. Ogarev National research Mordovian state University, Saransk
Gusev Alexander
post-graduate student, Professor A. I. Leshchankin Department mobile power tools and agricultural machines, N. P. Ogarev National research Mordovian state University, Saransk
EXPLANATION OF PARAMETERS AND OPERATING MODES OF A SELF-PROPELLED SOIL CULTIVATION CUTTER WITH THE COMBINED ROTATION OF THE ACTIVE WORKING TOOLS
The parameters and operation modes of a self-propelled soil cultivation cutter with a combined rotation of active working tools are justified. The research results are presented.
Keywords: soil cultivation, soil cultivation cutter, active working tools, combined rotation.
© АНО СНОЛД «Партнёр», 2020
© Купряшкин В. Ф., 2020
© Гусев А. Ю., 2020